凭借实时性、抗干扰性和安全性等优点,CAN2.0在工业及汽车行业得到了广泛应用,但其最高速率仅为1Mbit/s,每帧最多只能传输8字节的有效数据,报文中只有约50%的带宽用于有效数据传输。然而随着产业的发展,各种传感器和控制器数量的增多,总线上的数据量也激增,这使得CAN2.0总线在传输速率和带宽方面的缺点暴露的更加明显,于是就诞生了CAN-FD。
" a* i5 h+ [( [, A) s3 ?CAN-FD在传输速率和带宽方面有了明显的提升,波特率可高达8Mbit/s,每帧可多达64字节有效数据,传输效率可提高至约80%,能够进一步提高总线的实时性,拓宽总线的数据带宽,提升总线的传输效率。
在飞凌嵌入式OKMX8MP-C开发板上有两路CAN-FD,小编今天就基于这款开发板以处理器的M核与A核各控制一路CAN-FD互相通信为例,从应用角度讲述M核和A核如何控制CAN-FD高速通信。
飞凌嵌入式OKMX8MP-C开发板所搭载的NXP i.MX8M Plus处理器具备强悍的性能,集成4个主频最高可达1.8GHz (工业级主频为1.6GHz)的Arm Cortex-A53多任务核和1个Cortex-M7实时核,不管是对数据的高速吞吐、处理,还是复杂的人机交互界面处理,都能从容应对。
01
M核CAN-FD
1. CAN-FD初始化
CAN-FD初始化主要包括总线时钟,管脚和相应寄存器的初始化。具体如下:
& _6 V" L: y; w# f5 \ D(1)CAN总线时钟:
现将CAN总线倍频到800MHz,再10分频到80MHz。
CLOCK_SetRootMux(kCLOCK_RootFlexCan1, kCLOCK_FlexCanRootmuxSysPll1); // 设置CAN1总线时钟为800MHz CLOCK_SetRootDivider(kCLOCK_RootFlexCan1, 2U, 5U); // 分频因子为2*5=10,设置CAN1总线时钟为80MHz* I/ | Y8 N1 Q& e9 h(2)管脚配置:
选择CAN1的发送管脚为32脚,接收管脚为34脚。
IOMUXC_SetPinMux(IOMUXC_SAI2_TXC_CAN1_RX, 0U); // CAN1 RX IOMUXC_SetPinMux(IOMUXC_SAI2_RXC_CAN1_TX, 0U); // CAN1 TX# x) C i% m9 f3 N* G: ^& W0 w$ S5 z(3)CAN波特率:
CAN-FD支持可变速率,即控制区和数据区的波特率可以不一致,控制区最大为1Mbit/s;数据区最大为8Mbit/s。后续程序根据总线时钟和设置的波特率,分配时段设置的seg1,seg2等数值。
pConfig->bitRate = 1000000U; // CAN-FD控制区波特率为1Mbit/s pConfig->bitRateFD = 8000000U; // CAN-FD数据区波特率为8Mbit/s(4)CAN-FD使能:
除了使能CAN-FD,可变波特率也需要使能,否则数据区的最大速率和控制区的速率一样,最大为1Mbit/s。
base->MCR |= CAN_MCR_FDEN_MASK; // CAN-FD使能 fdctrl |= CAN_FDCTRL_FDRATE_MASK; // 可变波特率使能' E& u$ ~. L7 [$ d5 u# x(5)关闭自回环:
如果开启了自回环,那么CAN1数据会在芯片内回环,不会到外部管脚,在程序调试时可以排除外部端子的干扰,但真实应用时,需要关闭自回环,从外部管脚收发数据。
pConfig->enableLoopBack = false; // 不回环,使用外部管脚(6)帧格式:
本次我们使用11位标准数据帧,小伙伴也在后续试试扩展帧。需要设置自己的ID,便于总线上其他设备识别。
mbConfig.format = kFLEXCAN_FrameFormatStandard; // 11位标准帧,非扩展帧 mbConfig.type = kFLEXCAN_FrameTypeData; // 数据帧 非远程帧 mbConfig.id = FLEXCAN_ID_STD(rxIdentifier); // 帧ID 用于区别总线中不同的设备(7)接收过滤:
用户可设置接收过滤规则,这样就可以只接收特定帧ID的数据,减少应用处理的数据量。
rxIdentifier = 0;FLEXCAN_SetRxMbGlobalMask(EXAMPLE_CAN, FLEXCAN_RX_MB_STD_MASK(rxIdentifier, 0, 0));//接收所有ID数据; l6 a# G8 x, h0 A2. CAN-FD收发流程
本次测试M核做主站,CAN1先发送一帧包含64字节数据,A核CAN2收到,将64字节数据再次发送,M核CAN1接收。对比发送和接收的64字节数据是否一致。重复100次。
(1)CAN-FD发送数据:
EXAMPLE_CAN表示为CAN1,flexcanHandle为CAN实例,包含了发送接收回调函数,txXfer为要发送的64字节数据。
FLEXCAN_TransferFDSendNonBlocking(EXAMPLE_CAN, &flexcanHandle, &txXfer); // CAN-FD发送数据(2)CAN-FD接收数据:
EXAMPLE_CAN表示为CAN1,flexcanHandle为CAN实例,包含了发送接收回调函数,rxXfer为接收的64字节数据。
FLEXCAN_TransferFDReceiveNonBlocking(EXAMPLE_CAN, &flexcanHandle, &rxXfer); // CAN-FD接收函数(3)接收和发送数据对比:
for (j = 0U; j <= DLC; j++) // 对比收发数据,不一致打印 { if(txXfer.framefd->dataWord[j] != rxXfer.framefd->dataWord[j]) { LOG_INFO("Data mismatch !!! j=%d \r\n",j); } }8 z+ b5 r( q9 k9 X4 V+ z4 q$ m02
A核CAN-FD
A核设备树中保留CAN2,内核解析设备树在 /dev下生成can0。设置波特率后使能can0节点,应用程序中open函数打开接口,write函数发送数据,read函数接收数据。我们把CAN接口的示例已经作为一个跨平台的综合演示程序,小伙伴们可以直接加参数调用即可。
( ?+ \4 r! p6 G9 d1. 分配节点
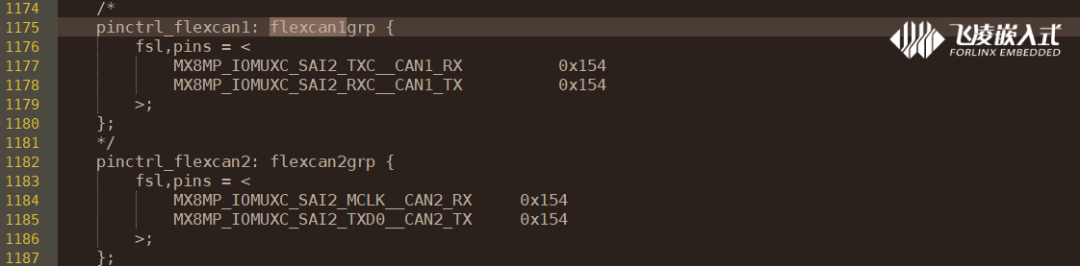
(1)M核独享CAN1,A核独享CAN2,修改设备树,在设备树OK8MP-C.dts中,删除CAN1设备节点,保留CAN2设备节点。编译新的设备树;
3 _' N, I4 ]: N' t" B/ v; N a(2)将生成的OK8MP-C.dtb和Image拷贝至开发板的
/run/media/mmcblk2p1/ 目录下,输入sync命令同步后重启开发板;
(3)通过A核串口输入命令uname -r ,显示内核版本,将 /lib/modbule目录下文件夹名称改为内核版本,这样才能自动加载模块生成can0节点,重启开发板。
 1 x. p& X: q. C4 K
1 x. p& X: q. C4 K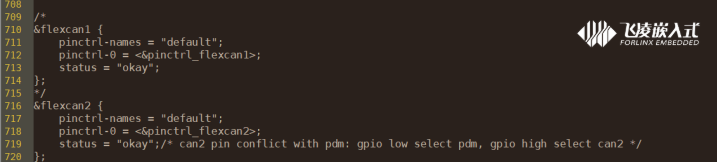
2. 演示Demo
进程名:can_demo; o1 w- \+ }9 U, t" V
使用方法:./can_demo设备名 [参数选项]… …

本次测试接口为can0(对应开发板CAN2),控制区波特率为1Mbit/s,数据区最大为8Mbit/s,11位标准帧,不过滤帧ID,不主动发数据,不回环。因此命令为:
03
程序验证
1. 硬件连接
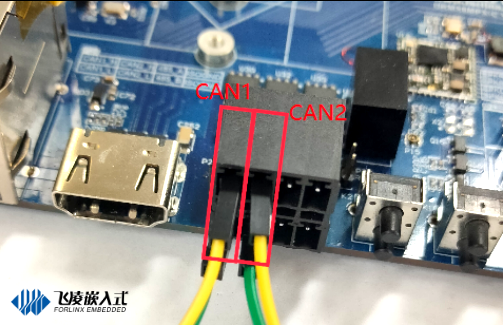
使用杜邦线将CAN1和CAN2的can-H短接,同时将can-L短接,注意不要接反。
2. M核程序
修改uboot环境变量设置M核自启动,同时将M核程序forlinx_m7_tcm_firmware.bin;
放到/run/media/mmcblk2p1/目录下。详细操作可看上篇文章《【玩转多核异构】M核程序的启动、编写和仿真》。
3. A核程序
(1)使用串口Xmodem,网络FTP,SCP,U盘,TF卡等多种方式,将can_demo从电脑拷贝至核心板默认目录下,输入以下命令修改权限;
(2)输入以下命令,A核应用程序can_demo将设置波特率后打开can0节点,等待M核发送的数据,再将接收的数据通过CAN2发送给M核。
4. 实际测试
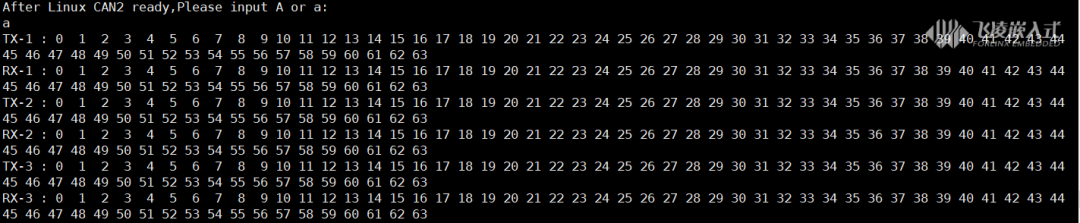
(1)OKMX8MP-C开发板重新上电后,M核程序启动,完成CAN1初始化后,在M核调试串口输出信息,等待按键;
(2)在A核调试串口输入以下命令,CAN2将处于接收的状态:
(3)在M核串口按下键A或a,M核CAN1发送64字节数据,A核CAN2接收数据,并将接收的数据再次发送,M核CAN1接收后和发送数据对比,输出结果。循环100次;
" o& n! b9 A' P: y# h, d(4)通过测试可以看到,依托i.MX8M Plus强大的性能,双核都以8Mbit/s的高速率发送大量数据,均没有出现异常。
 ) e7 ~: \+ N( {& U/ v% {3 o
) e7 ~: \+ N( {& U/ v% {3 o| 欢迎光临 EDA365电子论坛网 (https://bbs.eda365.com/) | Powered by Discuz! X3.2 |