EDA365电子论坛网
标题:
STM32 RS485 modbus通讯源程序
[打印本页]
作者:
ssdgh
时间:
2021-9-14 10:28
标题:
STM32 RS485 modbus通讯源程序
Modbus 一个工业上常用的通讯协议、一种通讯约定。Modbus协议包括RTU、ASCII、TCP。其中MODBUS-RTU最常用,比较简单,在单片机上很容易实现。modbus协议简单解析如下:
& T! z9 e% J1 t4 V
1、主机对从机写数据操作
& ~- w* T+ e0 v$ c
如果单片机接收到一个报文那么就对报文进行解析执行相应的处理,如上面报文:
+ K: J Y8 ]9 N. i! D5 E
01 06 00 01 00 17 98 04
. ^" D- j6 f# m" p8 Y
从机地址 功能号 数据地址 数据 CRC校验
) o: B. s: z" _
$ @2 `" V- J; G
假如本机地址是 1 ,那么单片机接收到这串数据根据数据计算CRC校验判断数据是否正确,如果判断数据无误,则结果是:
7 K$ d' \1 d7 Z2 d" l
HoldDataReg[1] = 0x0017;
7 Z& |. G6 \$ B
MODBUS主机就完成了一次对从机数据的写操作,实现了通讯。
k, p2 f5 E. B+ `$ H& p; q
/ ~4 _. N0 o; o' q w
2、主机对从机读数据操作
6 N* P' p; `% H
主机进行读HoldDataReg[1] 操作,则报文是:
0 F/ r G, ^7 M3 L& G8 }. A& y2 {& L% {
01 03 00 01 00 01 D5 CA
; H/ V R8 g h+ p2 T
从机地址 功能号 数据地址 读取数据个数 CRC校验
5 I8 _+ p/ R/ m9 a2 b' q
那么单片机接收到这串数据根据数据计算CRC校验判断数据是否正确,如果判断数据无误,则结果是:返回信息给主机,返回的信息也是有格式的:
/ z* ?! C' Y0 e' N, i4 I4 u1 M
返回内容:
0 e+ o' i7 R! Y; T
01 03 02 0017 F8 4A
1 f: d8 C4 G+ j5 W4 X
从机地址 功能号 数据字节个数 两个字节数据 CRC校验
! y2 q8 u: `0 X8 W8 |! M& j
MODBUS主机就完成了一次对从机数据的读操作,实现了通讯。
1 o8 r% V! g" h# k
4 u/ S6 ]6 ?) B, f' e: P& }+ n
1 M3 v- \2 A; J# K' F% q3 S' z0 N/ d
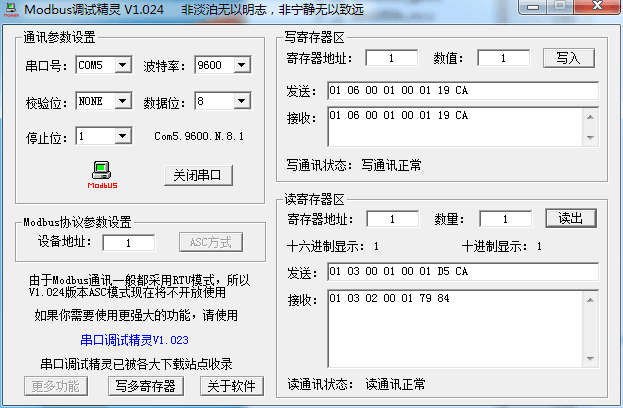
上传的程序是根据手把手教你51单片机的例程修改而来,能实现读/写操作(03,06码),成功通过modbus调试精灵测试,读写通讯正常!
q, a" P4 O7 u. E+ R4 S
由于刚接触modbus通讯协议,之前一直出现通讯超时的问题,找了网上很多资料,都不得其解,所以把程序拿出来和大家分享。希望和大家相互学习、共同进步!
9 n8 y( b# i$ p6 R. \
7 t! q' q+ Z" n% U. }4 O/ N
g9 G1 B5 n; H5 L& ~/ h7 {" u
单片机源程序如下:
. u& \; c7 \; ~, N
#include "rs485.h"
#include "SysTick.h"
#include "crc16.h"
#include "led.h"
/*******************************************************************************
* 函 数 名 : RS485_Init
* 函数功能 : USART2初始化函数
* 输 入 : bound:波特率
* 输 出 : 无
*******************************************************************************/
u8 USART2_RX_BUF[64]; //接收缓冲,最大64字节
u8 USART2_RX_CNT=0; //接收字节计数器
u8 flagFrame=0; //帧接收完成标志,即接收到一帧新数据
unsigned char regGroup[5]; //Modbus寄存器组,地址为0x00~0x04
void RS485_Init(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG|RCC_APB2Periph_GPIOA,ENABLE); //使能GPIOA\G时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//使能USART2时钟
/* 配置GPIO的模式和IO口 */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_2; //TX-485 //串口输出PA2
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化串口输入IO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3; //RX-485 //串口输入PA3
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //模拟输入
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3; //CS-485
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOG,&GPIO_InitStructure);
//USART2 初始化设置
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口2
USART_Cmd(USART2, ENABLE); //使能串口 2
USART_ClearFlag(USART2, USART_FLAG_TC);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启接受中断
//Usart2 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =2; //子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
RS485_TX_EN=0; //默认为接收模式
}
//1ms定时
void TIM2_Init()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//使能TIM4时钟
TIM_TimeBaseInitStructure.TIM_Period=1000; //自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=72-1; //分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //设置向上计数模式
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //开启定时器中断
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;//定时器中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2,ENABLE); //使能定时器
}
//计算发送的数据长度,并且将数据放到*buf数组中
u8 UartRead(u8 *buf, u8 len)
{
u8 i;
if(len>USART2_RX_CNT) //指定读取长度大于实际接收到的数据长度时
{
len=USART2_RX_CNT; //读取长度设置为实际接收到的数据长度
}
for(i=0;i<len;i++) //拷贝接收到的数据到接收指针中
{
*buf=USART2_RX_BUF
; //将数据复制到buf中
buf++;
}
USART2_RX_CNT=0; //接收计数器清零
return len; //返回实际读取长度
}
u8 rs485_UartWrite(u8 *buf ,u8 len) //发送
{
u8 i=0;
GPIO_SetBits(GPIOG,GPIO_Pin_3); //发送模式
delay_ms(3); //3MS延时
for(i=0;i<=len;i++)
{
USART_SendData(USART2,buf
); //通过USARTx外设发送单个数据
while(USART_GetFlagStatus(USART2,USART_FLAG_TXE)==RESET); //检查指定的USART标志位设置与否,发送数据空位标志
}
GPIO_ResetBits(GPIOG,GPIO_Pin_3); //设置为接收模式
}
//串口驱动函数,检测数据帧的接收,调度功能函数,需在主循环中调用
void UartDriver()
{
unsigned char i=0,cnt;
unsigned int crc;
unsigned char crch,crcl;
static u8 len;
static u8 buf[60];
if(flagFrame) //帧接收完成标志,即接收到一帧新数据
{
flagFrame=0; //帧接收完成标志清零
len = UartRead(buf,sizeof(buf)); //将接收到的命令读到缓冲区中
if(buf[0]==0x01) //判断地址是不是0x01
{
crc=GetCRC16(buf,len-2); //计算CRC校验值,出去CRC校验值
crch=crc>>8; //crc高位
crcl=crc&0xFF; //crc低位
if((buf[len-2]==crch)&&(buf[len-1]==crcl)) //判断CRC校验是否正确
{
switch (buf[1]) //按功能码执行操作
{
case 0x03: //读数据
if((buf[2]==0x00)&&(buf[3]<=0x05)) //寄存器地址支持0x0000~0x0005
{
if(buf[3]<=0x04)
{
i=buf[3];//提取寄存器地址
cnt=buf[5]; //提取待读取的寄存器数量
buf[2]=cnt*2; //读取数据的字节数,为寄存器*2,因modbus定义的寄存器为16位
len=3;
while(cnt--)
{
buf[len++]=0x00; //寄存器高字节补0
buf[len++]=regGroup[i++]; //低字节
}
}
break;
}
else //寄存器地址不被支持时,返回错误码
{
buf[1]=0x83; //功能码最高位置1
buf[2]=0x02; //设置异常码为02-无效地址
len=3;
break;
}
case 0x06: //写入单个寄存器
if((buf[2]==0x00)&&(buf[3]<=0x05)) //寄存器地址支持0x0000-0x0005
{
if(buf[3]<=0x04)
{
i=buf[3]; //提取寄存器地址
regGroup
=buf[5]; //保存寄存器数据
led3=0;
}
len -=2; //长度-2以重新计算CRC并返回原帧
break;
}
else
{ //寄存器地址不被支持,返回错误码
buf[1]=0x86; //功能码最高位置1
buf[2]=0x02; //设置异常码为02-无效地址
len=3;
break;
}
default: //其他不支持的功能码
buf[1]=0x80; //功能码最高位置1
buf[2]=0x01; //设置异常码为01—无效功能
len=3;
break;
}
crc=GetCRC16(buf,len); //计算CRC校验值
buf[len++]=crc>>8; //CRC高字节
buf[len++]=crc&0xff; //CRC低字节
rs485_UartWrite(buf,len); //发送响应帧
}
}
}
}
void UartRxMonitor(u8 ms) //串口接收监控
{
static u8 USART2_RX_BKP=0; //定义USART2_RC_BKP暂时存储诗句长度与实际长度比较
static u8 idletmr=0; //定义监控时间
if(USART2_RX_CNT>0)//接收计数器大于零时,监控总线空闲时间
{
if(USART2_RX_BKP!=USART2_RX_CNT) //接收计数器改变,即刚接收到数据时,清零空闲计时
{
USART2_RX_BKP=USART2_RX_CNT; //赋值操作,将实际长度给USART2_RX_BKP
idletmr=0; //将监控时间清零
}
else ////接收计数器未改变,即总线空闲时,累计空闲时间
{
//如果在一帧数据完成之前有超过3.5个字节时间的停顿,接收设备将刷新当前的消息并假定下一个字节是一个新的数据帧的开始
if(idletmr<5) //空闲时间小于1ms时,持续累加
{
idletmr +=ms;
if(idletmr>=5) //空闲时间达到1ms时,即判定为1帧接收完毕
{
flagFrame=1;//设置命令到达标志,帧接收完毕标志
}
}
}
}
else
{
USART2_RX_BKP=0;
}
}
/*******************************************************************************
* 函 数 名 : USART2_IRQHandler
* 函数功能 : USART2中断函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void USART2_IRQHandler(void)
. f$ ?8 s o" D; ~; q! ~3 r2 p& |+ I
' a; x* ^6 g& Q: o0 S* K. P
6 }: P9 O+ p7 ^# d% z/ S5 A% |
! [* S% N" X2 P Q% Y
作者:
nuiga
时间:
2021-9-14 11:05
为什么读取长度大于实际接收到的数据长度时?
3 L' G' a7 i0 j T" [; \" G- N
作者:
RNGxiaohu
时间:
2021-9-14 11:30
学习了 感谢分享
欢迎光临 EDA365电子论坛网 (https://bbs.eda365.com/)
Powered by Discuz! X3.2