
 7 g9 e- c' W2 f5 \3 N3 @# K
7 g9 e- c' W2 f5 \3 N3 @# K . J6 B) X8 @* ~4 b( e$ w* u, S( S
. J6 B) X8 @* ~4 b( e$ w* u, S( S bj-m += iTOP_IMX6_treedriver_hello.o 表示编译的源文件为iTOP_IMX6_treedriver_hello.c,如果源文件名有变化,则需要修改成对应的。" ?6 V% ^) Q: T. I, \0 n
bj-m += iTOP_IMX6_treedriver_hello.o 表示编译的源文件为iTOP_IMX6_treedriver_hello.c,如果源文件名有变化,则需要修改成对应的。" ?6 V% ^) Q: T. I, \0 n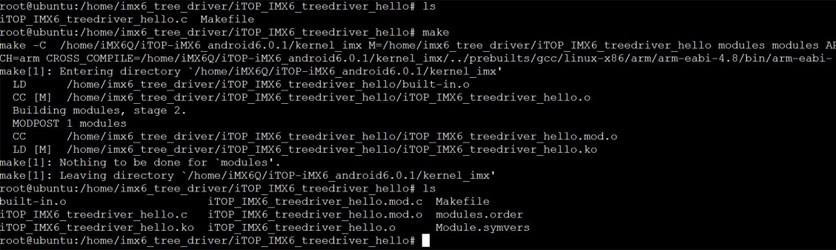 & u9 ?' l6 {! r1 r2 ~% w7 K' }
& u9 ?' l6 {! r1 r2 ~% w7 K' }
 % R& [0 \0 @, f( R
% R& [0 \0 @, f( R 0 G3 {1 Y8 w( N$ a* G: Z0 k
0 G3 {1 Y8 w( N$ a* G: Z0 k ' K- V; q# j! H8 G$ f' e6 j& V% C$ g
' K- V; q# j! H8 G$ f' e6 j& V% C$ g , t& `7 E. E9 W5 l$ m) `
, t& `7 E. E9 W5 l$ m) `| 欢迎光临 EDA365电子论坛网 (https://bbs.eda365.com/) | Powered by Discuz! X3.2 |