EDA365电子论坛网
标题:
CAN通信系统的结构是什么?
[打印本页]
作者:
TaylorA
时间:
2020-4-21 11:23
标题:
CAN通信系统的结构是什么?
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。
: S- ~2 a. w- w8 Q1 g3 t
目录
' N5 J0 ?4 F7 g$ H
! m$ r# R/ s7 C+ G; n2 |" h" H
$ p$ d9 w3 T6 h( k' |2 c" @
* H& S. \0 O1 C. X# B! S: r
; M1 c0 D; \. y6 S5 a; S+ K
CAN的简介
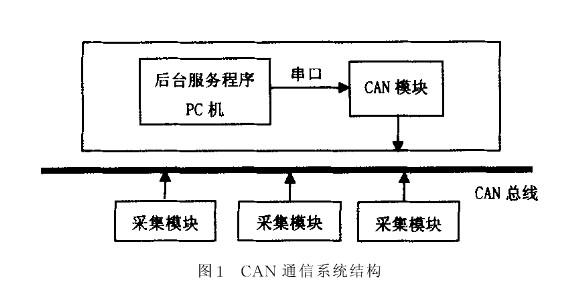
CAN通信系统的结构
4 l/ H8 Y$ v* z
6 [, d. ]3 L2 X% ^! Z
: C( f5 `5 e2 q) Z5 c8 {& b3 k
CAN的简介
: O/ t1 i: G- e* C. ]- t
- D C4 Q# B( e, \1 v# [' Q( t
; p# ~9 r) Z9 T
3 x* `* a& _9 L2 I# G/ j9 U
4 S3 J4 E9 c- {6 E+ U. N+ D
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,现在在欧洲已是汽车网络的标准协议。
% x5 J" G3 Z( r7 i |7 K
现在,CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
- V6 R1 i6 k; m4 k3 ?* H
1 S! H$ T4 y2 J2 E
CAN通信系统的结构
: @% x, S4 `6 l0 \9 r6 @
. {# a7 C. a$ r% z4 I
; O! Q4 V8 i% G% P4 Z, x; M3 P
0 G# Y+ r3 B. Z: T: p. V
: i5 @2 P% B |9 e3 b% q
}0 J @" y7 ^$ U6 G% ^" R" s
2 G& b! D) m8 y# u0 W
作者:
Monika
时间:
2020-4-21 13:47
在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来
欢迎光临 EDA365电子论坛网 (https://bbs.eda365.com/)
Powered by Discuz! X3.2