EDA365电子论坛网
标题:
浅谈毫米波系统未来的发展
[打印本页]
作者:
A-Lin
时间:
2018-10-29 09:53
标题:
浅谈毫米波系统未来的发展
浅谈毫米波系统未来的发展
9 L4 t) @2 H9 l+ A1 a, @8 L
9 Q' W' m7 j# L( Q1 z8 `2 |
随着ADAS普及率的提升,要能够全方位覆盖汽车周围环境的感测,一辆汽车会装载“长+中+短”多颗毫米波雷达,到了最终L5级自动驾驶阶段甚至超过10颗,预计2021年全球毫米波雷达的出货量将达到8400万个。
$ ?7 g( R1 c3 E9 p. h
! F' [3 P; N/ r) K
在上一篇《毫米波雷达在ADAS中的应用》中,麦姆斯咨询提到随着ADAS普及率的提升,要能够全方位覆盖汽车周围环境的感测,一辆汽车会装载“长+中+短”多颗毫米波雷达,到了最终L5级自动驾驶阶段甚至超过10颗,预计2021年全球毫米波雷达的出货量将达到8400万个。这是一个可预见的庞大市场,所以无论是传统的汽车Tier 1厂商,还是新兴的初创企业,都纷纷加入到汽车雷达产业中来,希望能分一杯羹!
8 e4 y3 k2 Y# v, g4 `
# d6 x+ B( d/ ?2 A- r9 L
不过现实的竞争又是很残忍的。首先,汽车的空间容量有限,特别是现在汽车主流是向轻便、节能方向发展,别说增加零部件了;其次,精明的消费者只接受加量不加价,性能提高了,价格还得降低。所以,能不能抢到市场先机,摆在各家毫米波雷达厂商面前的主要问题是如何实现“更小巧、更便宜、更智能”的毫米波雷达!带着这些疑问,今天我们来了解一下车载毫米波雷达系统及其核心元器件,探一探毫米波雷达技术的发展趋势。
- w. n) H, u Y( r& z {
) {/ C, x4 x$ V/ c
毫米波雷达系统基本结构
* `0 ]7 U2 ]% Y& \$ j Y3 Q; c8 n
, w5 \: \! r) j$ W
在《认识毫米波雷达》文章中,我们知道了毫米波雷达是基于多普勒原理,根据回波和发射波之间的时间差和频率差来实现对目标物体距离、速度以及方位的测量。根据辐射电磁波方式不同,毫米波雷达主要有脉冲和连续波两种工作方式(图1)。其中连续波又可以分为FSK(频移键控)、PSK(相移键控)、CW(恒频连续波)、FMCW(调频连续波)等方式。
" F. J/ V# F$ H1 o4 S7 x
% q. c. Q& Z* s6 P% b
* X9 X7 x/ ?5 ^
图1、毫米波雷达工作方式
6 _" [7 g. N8 c4 [* F
9 J: g9 w5 C/ N
FMCW雷达具有可同时测量多个目标、分辨率较高、信号处理复杂度低、成本低廉、技术成熟等优点,成为目前最常用的车载毫米波雷达,德尔福(Delphi)、电装(Denso)、博世(Bosch)等Tier 1供应商均采用FMCW调制方式。
7 f: P2 Q5 |4 C# E5 ]
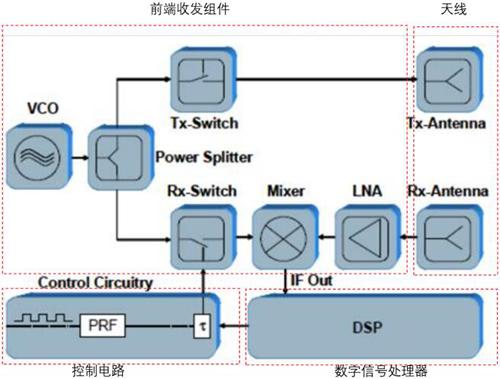
以FMCW为例(图2),毫米波雷达系统主要包括天线、前端收发组件、数字信号处理器(DSP)和控制电路,其中天线和前端收发组件是毫米波雷达的最核心的硬件部分。以下将分别详细介绍。
7 z2 k: X# I8 p. S; d
' }% P0 R# {' e8 D9 W6 k
图2、FMCW雷达系统
% {" }6 k$ P+ v6 n" J
& f# a2 Y' s K, U
天线
; X) \- |% Q* V% c8 `. c
+ I0 P* U# H. g; l
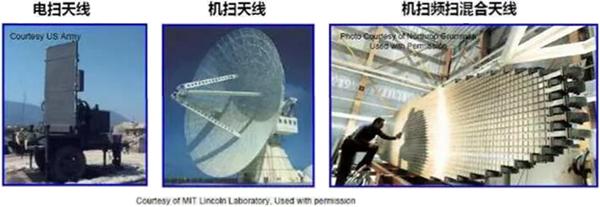
天线作为毫米波发射和接收的重要部件,是汽车毫米波雷达有效工作的关键设计之一,同时也影响到毫米波雷达能否赢得市场芳心。如果你路过雷达基站,一定对其庞大的机械扫描天线印象深刻(图3),显然这些天线对于外观和体积要求苛刻的汽车是不适合的。那么毫米波雷达的天线要如何设计?首先,天线的生产要能够大批量且低成本。其次,天线的设计要便于安装在车的头部。同时,天线必须被集成在车内而不能影响汽车的外观。
7 ?* _5 H2 ?( i+ G7 b2 V" m
, [, g0 f; m$ s: M) p
图3、不同尺寸与性状的的雷达天线
- b4 F- m8 ^5 R4 X! H
5 X3 ^! I+ d' f' D# b
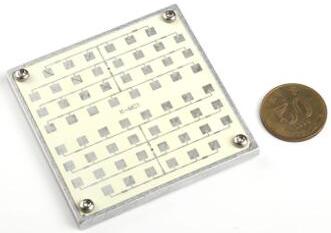
理论和实践证明,当天线的长度为无线电信号波长的1/4时,天线的发射和接收转换效率最高。因此,天线的长度将根据所发射和接收信号的频率或波长来决定。幸运的是,毫米波的波长只有几个毫米,所以毫米波雷达的天线可以做的很小,同时还可以使用多根天线来构成阵列天线,达到窄波束的目的。目前毫米波雷达天线的主流方案是微带阵列,最常见的一种是设计成可集成在PCB板上的“微带贴片天线”,如图4,在PCB板上的ground层上铺几个开路的微带线形成天线。
8 O4 ?7 l7 |2 c3 d. l& y
/ h! D8 z. j8 p& E( X/ R$ j5 ^9 i
图4、24GHz毫米波雷达PCB天线
: ]( r' C& c0 k) I0 N* ^
5 B, M, c, K1 v1 T+ L- b- U
相比一般的微波天线,这种微带天线具有的优点:(1)体积小,重量轻,低剖面,能与载体(如飞行器)共形;(2)低成本,适合于印刷电路技术大批量生产;(3)电性能多样化,不同设计的微带元,其最大辐射方向可以从边射到端射范围内调整,易于得到各种极化;(4)易集成,能和有源器件、电路集成为统一的组件等。上述优点极大地满足了车载雷达低成本和小体积的需求。
3 s9 @! f3 g& f" b
4 O9 D& w3 |) i0 _
当然,由于毫米波的波长较短,电路极易发射色散和产生高次模,而且基板材料的介电常数和损耗随频率的增加也变化非常明显,为了确保电路性能稳定一致,毫米波雷达需要选择介电常数稳定、损耗特性低等高性能的高频PCB基材。车载毫米波雷达市场的扩大,同样也驱动着高频基材及基材生产企业在此市场中的竞争,目前主要的国内外高频PCB基材厂商有:Rogers(美国)、Taconic(美国)、Isola(德国)、生益科技(中国)、沪士(中国)等。
! s6 |9 W' }9 ^
前端收发组件
) T' l h1 Z& Y: W
( K" s# Q+ Z" ^+ l# _+ L) m
前端收发组件是毫米波雷达的核心射频部分,负责毫米波信号调制、发射、接收以及回波信号的解调。车载雷达要求前端收发组件具有体积小、成本低、稳定性好等特点,最可行方法就是将前端收发组件集成化。目前前端收发组件集成的方法主要有混合微波集成电路(HMIC)和单片微波集成电路(MMIC)两种形式。
* }, k2 ]2 `1 U
% a& G$ M* Y, P0 \6 }$ B$ b
HMIC是采用薄膜或厚膜技术,先将微波电路制作在适合传输微波信号的基片(如蓝宝石、石英等),再将分立的有源器件连接、组装起来的集成电路。而MMIC则是采用平面技术,将所有的微波功能电路用半导体工艺制造在砷化镓(GaAs)、锗硅(SiGe)或硅(Si)等半导体芯片上的集成电路。MMIC集成的功能电路主要包括低噪声放大器(LNA)、功率放大器、混频器、上变频器、检波器、调制器、压控振荡器(VCO)、移相器、开关、MMIC收发前端,甚至整个发射/接收(T/R)组件(收发系统)。相比HMIC,显然MMIC大大简化了雷达系统结构,集成度高、成本低且成品率高,更适合于大规模生产。
% c5 `6 l3 {; y8 i& i8 J* g
( H( Y) v* |9 S$ v% o8 j4 O; Z
. a- W8 G# g0 M& X1 A! d# b6 y
图5、MMIC组成
. R: ~' s& q4 w6 ]& j- F7 {
1 b1 {* h. E. @: W
早期的MMIC主要采用化合物半导体工艺,如砷化镓(GaAs)、磷化铟(InP)等。化合物半导体具有大的禁带宽度、高的电子迁移率和击穿场强等优点,但缺点是集成度不高且价格昂贵。所以,近十几年来低成本、集成度高的硅基(CMOS、SiGe BiCMOS等)MMIC发展迅速。图6对这几种MMIC工艺技术的性能进行了对比。
5 X7 L' b" v! @ l! O3 A
. N: M0 N; ?' O
1 f+ m4 {% ~ i0 D5 W7 n; z8 k
图6、不同工艺技术的MMIC性能对比
8 D# s0 J. e" h- H6 O
* \4 {) K: Y8 O
目前大多数毫米波雷达前端MMIC基于SiGe BiCMOS技术,SiGe高频特性良好,材料安全性佳,导热性好,而且制程成熟,整合度较高,成本较低的优势。不过SiGe MMIC大都是分立式的,即发射器、接收器和处理组件均为独立单元,这使得其设计过程十分复杂,并且整体方案体积庞大。正如文章开头所说,一辆自动驾驶汽车最终需要有10多个雷达传感器,如果采用SiGe传感器,空间上的限制使得其“难堪重任”。所以,成本更低、产业链更成熟的CMOS工艺将成为“中意”的选择。利用CMOS工艺,不仅可将MMIC做得更小,甚至可以与微控制单元(MCU)和数字信号处理(DSP)集成在一起,实现更高的集成度。所以这不仅能显著地降低系统尺寸、功率和成本,还能嵌入更多的功能。
! g( h, H" p& `* c1 G
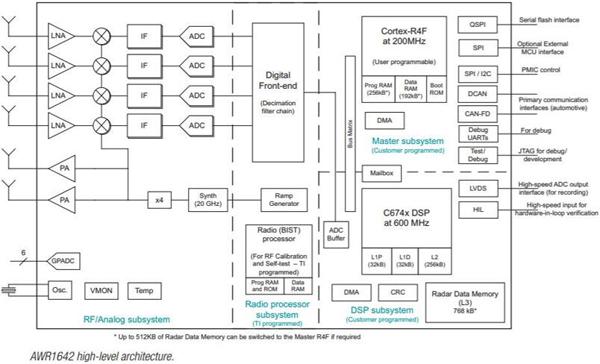
虽然CMOS雷达面临速度和低频噪声等问题,随着深亚微米和纳米工艺的不断发展,硅基工艺特征尺寸不断减小,栅长的缩短弥补了电子迁移率的不足,从而使得晶体管的截止频率和最大振荡频率不断提高,这使得CMOS工艺在毫米波雷达应用方面不断地取得突破。例如,恩智浦(NXP)和德州仪器(TI)陆续推出了基于CMOS工艺的毫米波雷达芯片,其中NXP率先将MCU集成进入了其RF CMOS收发器中。在今年德州仪器(TI)宣称其集成前端MMIC、DSP和MCU单芯片雷达解决方案(AWR1642)已实现了大规模量产,相比于传统的24GHz方案,其外形尺寸缩小33%、功耗减少50%、范围精度提高10倍以上,且整体方案成本更低。
: Z: J/ _( _1 }9 A4 p# p
! \' t0 F" k7 ^7 @& ^7 P% o5 x
0 w2 |3 M+ p6 | p/ \+ X, ?/ h! c
图7、德州仪器(TI)AWR1642毫米波雷达芯片的高级架构框图
/ h8 c5 @4 K K" R$ r: e7 k
* U" J7 j- G+ W6 x
目前MMIC技术主要由国外半导体公司掌控,如英飞凌(Infineon)、恩智浦(NXP)、德州仪器(TI)、意法半导体(ST)、亚德诺半导体(ADI)。随着近些年国内创新创业厂商逐渐增长,如厦门意行、加特兰、清能华波、矽杰微电子等,国内24GHz/77GHz MMIC关键技术已取得了突破,其中由意行半导体自主研发的24GHz SiGe雷达射频前端MMIC套片,实现了国内该领域零的突破,打破国外垄断,现已实现量产和供货。去年,加特兰也发布了其国内首款77GHz CMOS车载毫米波雷达收发芯片。
: k- Q" ?6 x1 ~7 O) |* _6 n0 E4 g; w3 L
( S! y1 l3 R$ G' Z A9 M- J5 a+ J
数字信号处理器(DSP)
* d; P8 q7 K% Z4 ?7 H2 @, ^
" p: }$ k- z/ s: F) e2 s7 Y
数字信号处理系统也是雷达重要的组成部分,通过嵌入不同的信号处理算法,提取从前端采集得到的中频信号,获得特定类型的目标信息。毫米波雷达的数字处理主要算法包括:阵列天线波速形成和扫描算法、信号预调理、杂波处理算法、目标检测/测量的算法、目标分类与跟踪算法以及信息融合算法。数字信息处理是毫米波雷达稳定性、可靠性的核心。
0 f% G2 z5 x9 l' \; h0 [: o. u
& G2 b$ G- y0 E$ a; ]
数字信号处理可以通过DSP芯片或FPGA芯片来实现。DSP芯片即指能够实现数字信号处理技术专用集成电路。DSP芯片是一种快速强大的微处理器,独特之处在于它能即时处理资料。DSP芯片的内部采用程序和数据分开的哈佛结构,具有专门的硬件乘法器,可以用来快速的实现各种数字信号处理算法。FPGA即现场可编程门阵列,它是作为专用集成电路(ASIC)领域中的一种半定制电路而出现的,既解决了定制电路的不足,又克服了原有可编程器件门电路数有限的缺点。
" W3 h, C- ]1 @7 {- n; P% d9 {
# {7 H9 ~; j5 ~& Y6 x% L8 g
FPGA芯片与DSP芯片是有区别的。DSP是专门的微处理器,适用于条件进程,特别是较复杂的多算法任务。FPGA包含有大量实现组合逻辑的资源,可以完成较大规模的组合逻辑电路设计,同时还包含有相当数量的触发器,借助这些触发器,FPGA又能完成复杂的时序逻辑功能。在雷达信号处理、数字图像处理等领域中,信号处理的实时性至关重要。由于FPGA芯片在大数据量的底层算法处理上的优势及DSP芯片在复杂算法处理上的优势,融合DSP+FPGA的实时信号处理系统的应用越来越广泛。
4 h# w' N2 L) B6 q n
6 [9 Q6 Y4 l! I9 f0 @1 |
目前高端DSP芯片和FPGA芯片主要被国外企业垄断,DSP芯片制造商主要有德州仪器(TI)、亚德诺半导体(ADI)、意法半导体(ST)、英飞凌(Infineon)、恩智浦(NXP)等。FPGA市场的主要厂商有赛灵思(Xilinx)、阿尔特拉(Altera,被Intel收购)、美高森美(Microsemi)以及莱迪思(Lattice)。
! }: I! O; ~! g; e
; w* |; l/ w) P5 G+ Q9 e% j
控制电路
* ?' v% Q0 K; a" {: C6 |
: w3 \1 J ^5 J2 e9 J) S4 X. i
控制电路是汽车雷达系统实现汽车主动安全控制执行的最后一环,根据信号处理器获得的目标信息,结合车身动态信息进行数据融合,最终通过主处理器进行智能处理,对车辆前方出现的障碍物进行分析判断,并迅速做出处理和发出指令,及时传输给报警显示系统和制动执行系统。当前方车辆或物体距离过近超警戒设置时,报警显示系统能以声、光及触觉等多种方式告知或警告驾驶员,前方有危险需要谨慎驾驶。如遇危险时启动制动系统迅速根据险情对车辆做出包括减速、重刹、停车等主动干预动作,从而保证驾驶过程的安全性和舒适性,减少事故发生几率。
. A8 e/ O" U k7 h+ L
毫米波雷达发展趋势
) N4 x2 i5 Q y& j. x1 h
; I: c7 N c1 v3 ?4 A( I
综上分析,毫米波雷达技术的发展趋势是朝着体积更小、功耗更低、集成度更高和多项技术共存融合(性价比更高)方向发展。
$ c& @4 ?. S# l5 A7 J9 e0 @/ O
4 ?( v- J6 t' X2 w
从频段上,由于77GHz比24GHz具有更小的波长,可进一步缩减天线尺寸,更便于安装部署。同时77GHz频段带宽更大、探测距离更远、精度更高,正逐渐成为主流。不过24GHz在短程BSD/LCA等应用成本优势明显,将长期与77GHz互补共存。
6 ^9 H" L7 d9 V. Q4 F5 q7 u
4 F6 z5 w0 H* V4 G. K( c Z
在前端收发组件,高集成化的MMIC成为了主流,在工艺上先是SiGe替代了GaAs,当前正慢慢朝CMOS方向发展。由于GaAs、SiGe和CMOS各有优缺点,在超高速、超高频领域,CMOS目前还是比不上GaAs,市场上同时对于几种工艺都有需求。
3 p; l* a4 ]- p- B1 o$ b
- {+ t1 D5 ^# I- Z8 l
对于汽车应用来说,不仅要考虑毫米波雷达前端的集成,与其它传感器的融合,还要考量与主处理器的“合作”,到底是集成还是分立,还是需灵活折中?从产品趋势来看,一种是传感器本身的融合或高度集成,如将毫米波雷达前端与摄像头等其它传感器集成;另一种是单芯片系统方案,即“多传感器+主处理器+数字信号处理器”,未来的争夺战也将围绕这两方面展开,当然性价比是前提。在市场需求层面,既需要有雷达前端集成芯片,亦需要单芯片系统方案,以满足客户的差异化需求。
# P, {4 j7 P1 C1 r; a
! \0 w/ i/ `, |7 n! W+ G
总之,上述技术发展最终结果是要实现“更小巧、更便宜、更智能”的毫米波雷达,为ADAS、自动驾驶和终极的无人驾驶服务!
) m7 O/ K. S& m- h
; _1 x% t) _1 r# u
; p7 L; K; X' J8 J" b% C9 }# R
作者:
Mhza
时间:
2018-10-29 16:18
好好学习,天天向上
作者:
阿波罗0号
时间:
2018-10-29 22:20
daydayup
欢迎光临 EDA365电子论坛网 (https://bbs.eda365.com/)
Powered by Discuz! X3.2

 / h! D8 z. j8 p& E( X/ R$ j5 ^9 i
/ h! D8 z. j8 p& E( X/ R$ j5 ^9 i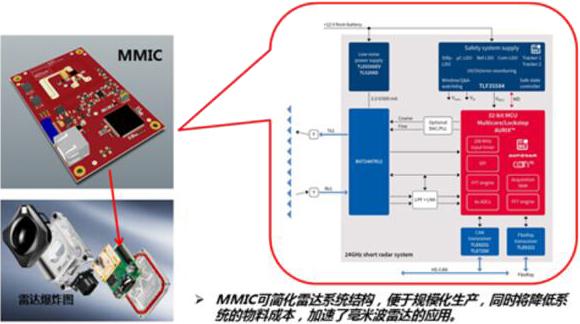 . a- W8 G# g0 M& X1 A! d# b6 y
. a- W8 G# g0 M& X1 A! d# b6 y